Energy Resource
力之源科技

PRODUCTS
产品中心





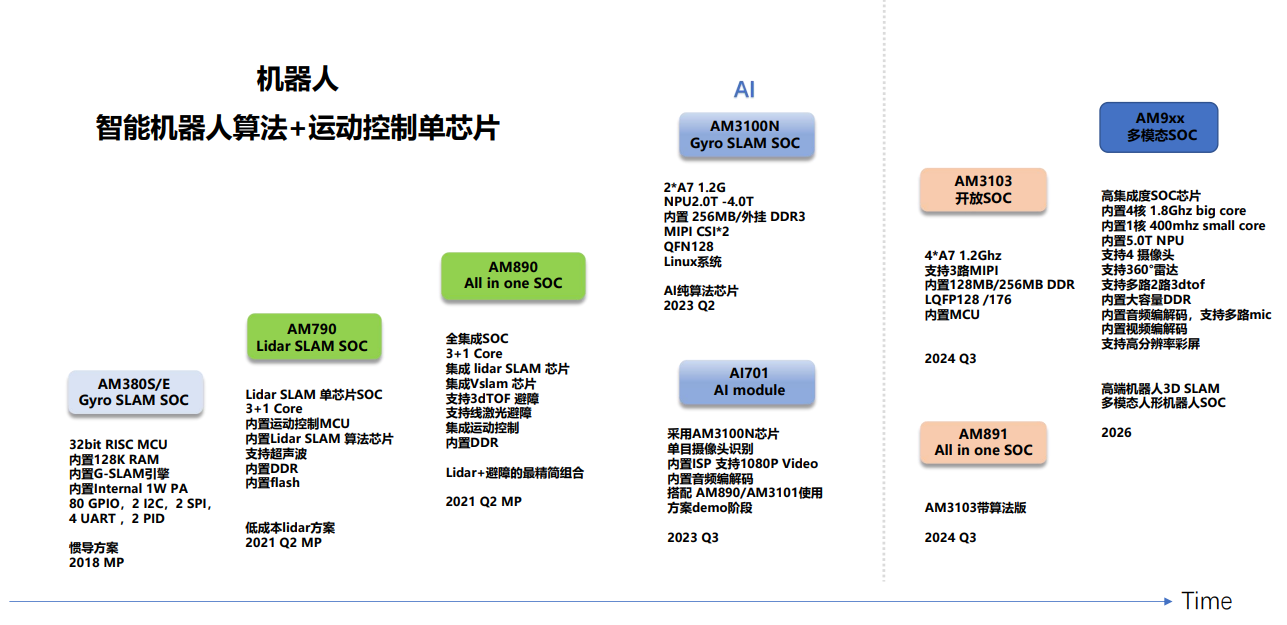
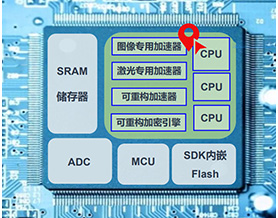
算法芯片化
设计敏捷化
未知环境
高效感知与地图构建
核心算法模组化方法
高能效硬件加速
及信息安全技术
片上系统设计方法
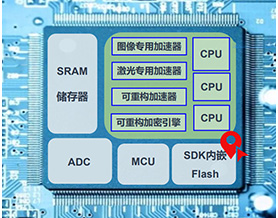
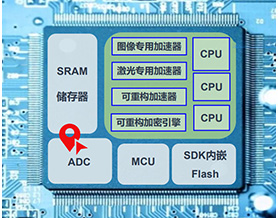
低功耗高算力
异构多核高集成
片上系统设计方法
硬件加速化
动态复杂环境定位导航
核心算法模组化方法
芯片多核化
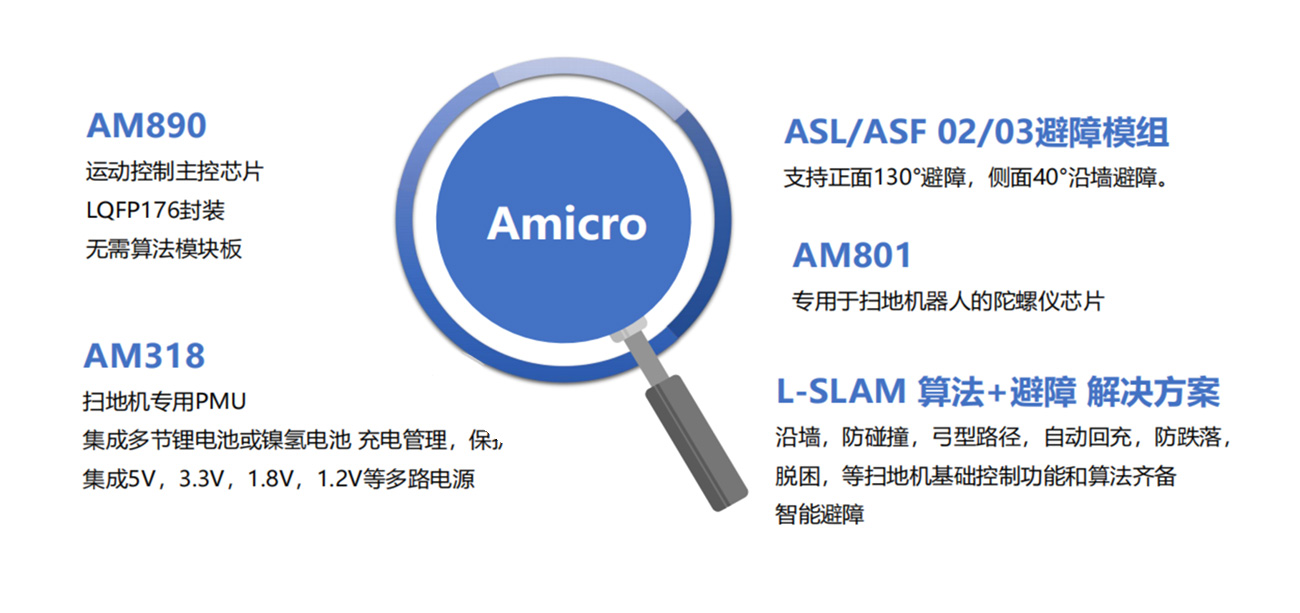


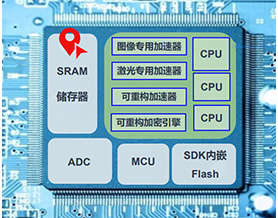
产品系列
芯片应用方案
数据加密方案
定制化方案
友情链接
公司地址:深圳市宝安区西乡宝田一路易赛科技园D座2楼205
热线:0755- 83432776
邮箱:david.zhao@er-tech.cn
- 无数据
力之源科技
版权所有:深圳力之源科技有限公司
联系方式
Energy Resource